|
车轮非常适合在平坦道路上行进,但当地面上覆盖松散的沙子和较大的岩石时,机械装置则寸步难行。目前,科学家依据蜥蜴活动特征最新研制一款6腿机器人,该创新技术意味着未来我们可以派遣快速行进漫步车登陆火星表面进行勘测。
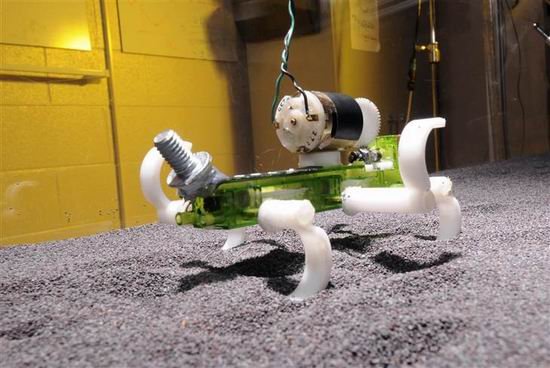
科学家最新设计一种蜥蜴机器人,可适用于沙质表面行进
研究人员设计的新型6腿机器人足部呈现C状结构
美国乔治亚理工学院物理学家丹尼尔-古德曼称,像这款机器人的附肢非常适用于较少固体物质表面上行进。之前科学家曾设计具有鸟类特征的飞机和海豚特征的水下航行器,然而他们很少知道足部蹦跳和沙质微粒之间的互动作用,为什么蜥蜴能够快速穿行沙地仍是一个谜团。
他和同事使用X射线和其它观测技术研究了蜥蜴如何在沙地表面奔跑,并提出一种理论描述该动物行进的物理原理。研究小组首次使用计算机模拟测试了该理论,之后设计了一款6腿机器人,有助于在沙箱中蹦跳,这个沙箱放置着罂粟籽和玻璃珠等微粒。
研究小组设计的6腿机器人具有C型足部,这是在沙箱中行进的最优化设计,这个机器人体长12.7厘米,重量为0.136公斤,是适用于搜寻和营救任务的机器人,它还能在火星等表面进行环境勘测。
古德曼指出,目前不仅意味着我们能潜在理解蜥蜴腿部外型的运行原理,还能揭晓一个机器人如何能够在松散物质上奔跑。目前,这份研究报告发表在《科学》杂志上。
该研究小组将进一步改善设计模型来解释沙层流动,像沙丘等丘陵地带的颗粒物质,理解潮湿沙层中的交互作用。加州理工学院机械工程师梅兰妮-亨特说:“在沙丘上行进具有一定的挑战性,这款机器人对于理解松散地形和机械装置非常有用。”
这款新型机器人有望帮助美国宇航局发射巨大的机械蜥蜴抵达火星表面,在丘陵、沙质地形上蹦跳行进,如果火星表面真实存在远古湖泊,将有望采集到大量潮湿的沙层样本。 |


